

Wenn der Roboter den Patienten motiviert
Rehabilitation mit der Hilfe von Robotern hat sich weltweit etabliert. Jetzt geht die Entwicklung einen entscheidenden Schritt weiter. Beim mit 1.6 Millionen Euro geförderten EU Projekt MIMICS erforschen die Wissenschaftler, wie die Therapie mit Roboterunterstützung noch effizienter sein kann.

Für Schlaganfall- oder Unfallpatienten ist der Weg zurück in ein normales Leben sehr schwer. Einfache Bewegungsabläufe, wie der Weg zum Briefkasten oder das Greifen einer Kaffeetasse, können zu unüberwindbaren Hindernissen werden. Wie gut sich Patienten wieder im Alltag zurechtfinden können, entscheidet oft eine frühe und regelmässige Rehabilitation. Eine Lauf- oder Armtherapie ist sehr aufwendig und für den Therapeuten und den Patienten sehr kraftanstrengend und dadurch zeitlich begrenzt. Eine hilfreiche Unterstützung bieten verschiedene Rehabilitationsroboter. Einer davon ist der „Lokomat“. Mit seiner Hilfe lassen sich Bewegungen öfter und in unterschiedlicher Intensität durchführen.
Patienten noch besser motivieren
Jetzt
werden die Rehabilitationsroboter weiterentwickelt. Unter dem Titel „Multimodal
Immersive Motion Rehabilitation with Interactive Cognitive Systems“, kurz MIMICS
genannt, haben sich führende Forscher aus der Robotik, Präsenzforschung und der
Neurorehabilitation zusammengeschlossen. Projektleiter Robert Riener, Professor
am Institut für Robotik und Intelligente Systeme der ETH Zürich und
Professor am Paraplegikerzentrum des Unispitals Balgrist, fasst die Zielsetzung
von MIMICS zusammen: „Ziel des neuen Verfahrens ist es, Virtuelle Realität so
einzusetzen, dass der trainierende Schlaganfallpatient maximal motiviert wird
und die Therapieübungen automatisch und kontinuierlich an das Können des
Patienten und dessen Aufmerksamkeit angepasst werden.“
Bisher
können Roboter bei der Rehabilitation diverse Übungen mit dem Patienten
durchführen. In Zukunft soll die Aufmerksamkeit eines Schlaganfallpatienten und
die Intensität der Übungen durch Sensoren beobachtet werden, um so direkt in den
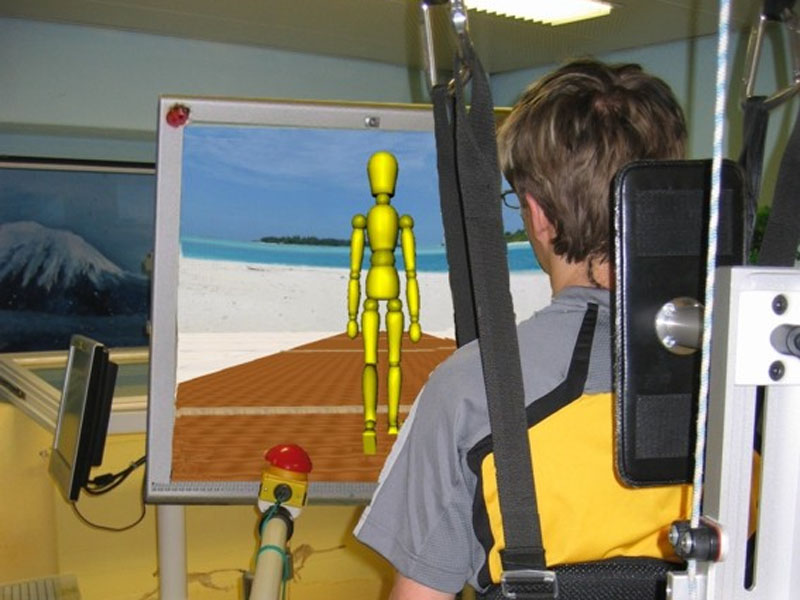
Übungsverlauf eingreifen zu können. „Der Patient läuft auf einen Laufband. Vor
ihm befindet sich eine Leinwand, auf der er einen Weg sieht, den er gehen soll.
Dort werden virtuelle Hindernisse, wie zum Beispiel eine Bordsteinkante,
gezeigt, die er übersteigen muss. Stellen wir durch unsere Sensoren fest, dass
die Aufmerksamkeit des Patienten nachlässt oder dass die Übungen zu einfach
sind, so können wir in Zukunft den Übungsablauf automatisch verändern“, erklärt
Robert Riener.
Training mit allen Sinnen
Der
Patient wird während des Trainings mit allen Sinnen angesprochen. Läuft er zum
Beispiel über einen Holzboden, so ertönt ein solches Geräusch auch aus den
Lautsprechern. Bei nachlassender Aufmerksamkeit, wird dem Patienten auf dem
Bildschirm zum Beispiel ein Ball präsentiert, den er in ein Tor schiessen soll.
Läuft er zu langsam, so erscheint eine Person in der virtuellen Welt, die ihm
diesen wegnimmt. Die neuen Systeme interagieren mit dem Patienten und stellen
sich so kontinuierlich auf seine physische und psychische Verfassung ein ohne
ihn zu über- oder unterfordern. Durch diesen Feedback-Mechanismus erhöhen sich
die Qualität und die Intensität des Trainings und damit die Chancen auf die
Rehabilitation des Patienten.
Ziel
des drei Jahre dauernden Forschungsprojektes ist es, herauszufinden, wie diese
verschiedenen Informationen abgerufen, ausgewertet und als neue Parameter
wieder in das System eingebracht werden können. Insbesondere drei Messgrössen
werden dabei untersucht: die physiologischen Werte, die biomechanischen Daten
und das Verhalten des Patienten. Bei den physiologischen Werten wird zum
Beispiel die Herzfrequenz gemessen und bei der Biomechanik die Kraft, die der
Patient für die Übung aufwendet, ausgewertet. Gleichzeitig wird überprüft wo
der Patient hinschaut und wie aufmerksam er das Training verfolgt. Die
technische Herausforderung liegt darin alle Daten durch eine Sensorfusion
miteinander zu vernetzen und in Echtzeit auszuwerten.
Projekt von der EU gefördert
Das Projekt wird von der EU durch das „7. Rahmenprogramm“ mit 1.6 Millionen Euro für drei Jahre gefördert. Das gesamte Projektvolumen beträgt 2.2 Millionen Euro. Rund 120 Projekte hatten sich um eine EU-Förderung beworben. Lediglich zehn Prozent erhielten jetzt eine Zusage. Für Robert Riener ist der Zuschlag auch ein Beweis für die Professionalität der Projektpartner: „In einem solch schwierigen Wettbewerbsumfeld eine Zusage zu erhalten, ist nicht einfach. Wir hatten durch die langfristige interdisziplinäre Forschung gute Voraussetzungen.“ Neben der Projektleitung durch Robert Riener, Professor am Institut für Robotik und Intelligente Systeme der ETH Zürich und Professor am Paraplegikerzentrum des Unispitals Balgrist, sind folgende Partner am Projekt beteiligt: das Universitätsspital Balgrist mit Professor Volker Dietz, die Universität Ljubljana in Slowenien mit Professor Marko Munih, die Universtat Politècnica de Catalunya in Spanien mit Professor Mel Slater, die Neurologische Klinik Bad Aibling in Deutschland mit Dr. Friedemann Müller sowie als Industriepartner die Hocoma AG in Volketswil.
|
|








LESERKOMMENTARE