

Ein Heer von Mikrorobotern
Am Multi-Scale-Robotics-Lab konstruieren Wissenschaftler winzige Roboter, die in Zukunft Skalpelle ersetzen und Medikamente im Körper gezielt transportieren könnten. Die Forschenden haben nun wichtige Schritte in Richtung Anwendung erzielt.
Man kennt den Trend aus der Elektronik. Die Geräte werden immer kleiner und dabei erst noch leistungsfähiger. Die stetige Verkleinerung von einzelnen Bauteilen spielt aber nicht nur eine Rolle, wenn es um Computer oder Smartphones geht, sondern auch in den Bereichen Chemie, Biologie und Medizin. Zum Beispiel nutzen Wissenschaftler neue Erkenntnisse aus der Fluiddynamik, um Flüssigkeiten in Mini-Laboren zu untersuchen, die nicht grösser sind als ein Computerchip. Auch medizinische Anwendungen werden immer präziser und verfolgen das Ziel des minimalen Eingriffs. So sollen kleinste Instrumente das Skalpell an den Stellen ersetzen, die für Chirurgen nur schwer zugänglich oder die extrem empfindlich sind. Auch Onkologen suchen nach Möglichkeiten, um Medizin direkt zu kranken Zellen zu transportieren und nicht den ganzen Körper des Patienten mit Chemotherapien zu belasten.
Magnetkraft als Antrieb
Die Gruppe von Bradley Nelson, Professor am Institut für Robotik und Intelligente Systeme der ETH Zürich, entwickelt kleinste Instrumente, die solche Anwendungen möglich machen sollen. Am Multi-Scale-Robotics-Lab bauen die Wissenschaftler Mikroroboter, die sich mit der Kraft von Magnetfeldern steuern lassen. Magnetfelder sind deshalb sinnvoll, weil Batterien schlicht zu gross wären und chemische Antriebe für Anwendungen im menschlichen Körper nicht in Frage kommen.
Doch die winzigen, teilweise wenige Mikrometer kleinen Roboter können nur bis zu einem bestimmten Punkt einfach mit Magnetkräften gesteuert werden. Je kleiner ein Gegenstand ist, desto schwächer sind seine magnetischen Eigenschaften und desto schwieriger wird es, ihn zu bewegen – sprich ihn in eine bestimmte Richtung zu ziehen oder ihn ähnlich einer Kompassnadel, die nach Norden zeigt, auszurichten.
Von der Natur abgekupfert
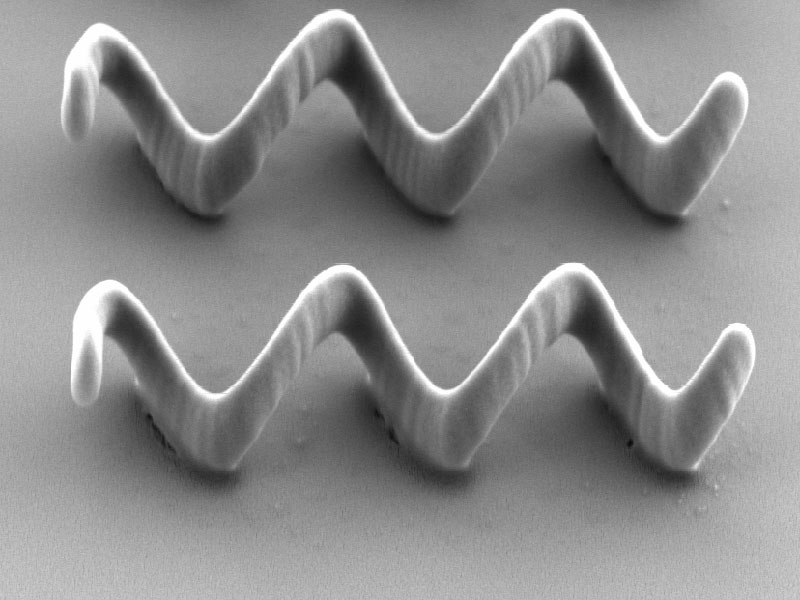
Um diese Schwierigkeit zu überwinden, haben sich die Wissenschaftler die Natur zum Vorbild genommen. Beim Studium verschiedener Bakterien fiel ihnen auf, dass sich bestimmte Arten mit Flagellen, einer Art Schwanz, spiralförmig vorwärts bewegten. Ein Forscherteam aus Japan konstruierte 1996 erstmals eine Helix, die sie mit Magnetfeldern zum Rotieren brachten.
Die Wissenschaftler um Bradley Nelson haben diese Forschung auf den Mikrometer-Bereich adaptiert und weiterentwickelt. In den letzten Jahren trieben sie diese soweit voran, dass mögliche Anwendungen absehbar sind. Dafür erhielten sie neben mehreren Publikationspreisen auch noch einen Eintrag in das Guinness Buch der Rekorde 2012 für den «Kleinsten medizinischen Roboter». Vor kurzem widmete ihnen nun die Fachzeitschrift «Chemistry» eine Review.
Besser sein als die Natur
«Wir sind ständig auf der Suche nach neuartigen Formen, mit welchen wir die physikalischen Gesetze ausreizen können», erklärt Kathrin Peyer, Doktorandin von Bradley Nelson, die wesentlich am Erfolg der letzten Jahre beteiligt war. Sie erinnert sich gut an den Beginn der Forschung: «Am Anfang war die Helix eine technische Spielerei.» Doch die Wissenschaftler spürten, dass sie auf dem richtigen Weg waren und fingen bald an, verschiedene Formen und Antriebsmethoden von magnetischen Mikrorobotern zu vergleichen. Die Wissenschaftler konnten nicht nur zeigen, dass die Helixform bei Instrumenten, die kleiner sind als ein Millimeter, erfolgreicher ist als Roboterformen, die direkt mit Magnetkräften angetrieben werden, sie konstruierten auch verschiedene Modelle, die sich in verschiedenen Flüssigkeiten unterschiedlich verhalten.
Der Stoff, aus dem die Roboter sind
Sie seien aber auch immer vom Ehrgeiz getrieben, ein System zu entwickeln, das noch besser sei als die Natur. Schliesslich hätten sie mit der Magnetkraft einen zusätzlichen Vorteil, den es im natürlichen Umfeld nicht gäbe, sagt Peyer. Ein Meilenstein in der Forschung bedeutete eine neue Fabrikationsmethode, welche die Ingenieure letztes Jahr in der Fachzeitschrift «Advanced Materials» veröffentlichten. Es gelang ihnen, die Mikroroboter aus Polymeren herzustellen. Diese sind für den Menschen besser verträglich als solche aus Metall und sie lassen den Wissenschaftlern mehr Freiheit in der Gestaltung. Für die magnetische Steuerung verkleideten Peyer und ihre Kollegen die Miniroboter mit weichmagnetischem Material und Titan. Titan wird in der Medizin breit eingesetzt und unter anderem auch für künstliche Gelenke verwendet.
Die Frage nach geeigneten Materialien treibt die Forscher heute noch an. Mittlerweile arbeiten mehrere Chemiker und Materialwissenschaftler im Bradley Nelsons Labor. Sie suchen beispielsweise nach funktionalen Materialien. Diese benötigen die Ingenieure vor allem, wenn sie Roboter konstruieren, die Zellen oder Medikamente transportieren sollen. «Hier sind unserem Erfindungsgeist keine Grenzen gesetzt», sagt Kathrin Peyer. Die Forschenden arbeiten heute schon mit Prototypen, die über eine Art Hand verfügen und Zellen «greifen» können. Doch auch bei der Biokomptabilität sind laut Peyer noch nicht alle Fragen geklärt. Schliesslich müssen die Mikroroboter über eine gewisse Zeit mit den menschlichen Körperzellen koexistieren können, ohne dass sie vom Immunsystem angegriffen werden und sich Zellen an den Roboter anhängen.
Roboter sichtbar machen
Die Forschenden arbeiten zudem an einem weiteren Problem:
Mikro- und Nanoroboter, die so klein sind, dass man sie von blossem Auge nicht
oder fast nicht sieht, müssen auch im Körper überwacht werden. Die Magnetfelder
lassen sich zwar an- und abstellen und die Wissenschaftler können sehr genau
einstellen, wie viel Kraft sie einsetzen wollen. Trotzdem müssen die
Forschenden die Roboter im Körper sichtbar machen, um sie gezielt steuern zu
können. Kathrin Peyer kann sich vorstellen, dass die Wissenschaftler einen Weg
finden, die Magnetresonanztomographie für ihre Zwecke zu nutzen. «MRI ist für
uns deshalb interessant, weil wir auch mit einem magnetischen System arbeiten»,
erklärt sie. Andere Forschungsgruppe würden mit Fluoreszenz arbeiten und hätten
auch schon Versuche mit Mäusen unternommen, die erfolgreich waren. Diese
Methode funktioniert allerdings nur, wenn man direkt unter der Hautoberfläche
arbeitet.
Literaturhinweis
Peyer et al. Magnetic Helical Micromachines, Chemistry, Volume 19, Issue 1, Article published online: 30 Nov 2012. DOI: 10.1002/chem.201203364.






LESERKOMMENTARE