

Chirurg zum Verschlucken
Roboter in Pillenform könnten in Zukunft bestimmte chirurgische Eingriffe ohne Verwundung des Körpers durchführen. Wie solche chirurgischen Bio-Mikroroboter funktionieren könnten, zeigt eine neue Publikation des Instituts für Robotik und intelligente Systeme der ETH Zürich.
Paolo Dario, Professor für biomedizinische Robotik an der Scuola Superiore Sant’Anna in Pisa, Italien, erklärte in der Septemberausgabe des amerikanischen Wirtschaftsmagazins „The Economist“ den Anbruch einer neuen Medizin-Ära. Chirurgische Eingriffe mit offenen Wunden würden je länger je mehr von non-invasiven Techniken abgelöst, bis hin zu Systemen, welche Operationen ohne eine einzige Narbe ermöglichen.
Eine entscheidende Rolle kommt dabei der Bio-Mikrorobotik
zu. Genauso wie die Scuola Superiore Sant’Anna ist auch die ETH Zürich Teil des
EU-Forschungsprojekts ARES, einem Zusammenschluss von Robotikern aus vier
europäischen Hochschulen. Gemeinsam wollen die Forscher Mikroroboter für
medizinische Anwendungen nutzbar machen. Roboter, nicht grösser als eine
herkömmliche Pille, sollen zukünftig im Magen-Darmtrakt eine Reihe von Aufgaben
verrichten, wie zum Beispiel eine Magenspiegelung oder eine Gewebeentnahme.
Zwar gibt es bereits seit sieben Jahren Mikrokameras in Form von Pillen, die heute in der Chirurgie zur Magen-Darm-Untersuchung erfolgreich eingesetzt werden, doch sind diese Systeme passiv. Die Kamera schiesst tausende von Bildern während des Magen-Darm-Durchgangs, ihre Position kann in dieser Zeit jedoch nicht gesteuert werden. Dies soll sich bald ändern, denn ARES-Wissenschaftler entwickeln zurzeit Mikroroboter mit insektenähnlichen, steuerbaren Beinen, mit welchem sich die „Roboterpille“ im Magen bewegen könnte. Andere Gruppen beschäftigen sich mit speziellen Vorrichtungen für die Gewebeentnahme. Mit solchen Instrumenten könnten zukünftig geschädigte Magen-Darm-Regionen exakt untersucht werden und gleichzeitig Gewebeproben für spätere Untersuchungen entnommen werden.
Mehrgliedriger, selbstorganisierender Magenroboter
Eine der grössten Herausforderungen für die Robotiker betrifft die enorme Miniaturisierung der elektronischen Systeme. Innerhalb von wenigen Kubikmillimetern muss die gesamte Technologie des Systems sowie die Stromversorgung Platz finden. Bei den bereits etablierten Mikrokameras werden 60 Prozent des Pillenvolumens alleine von der Batterie beansprucht. Eine Schlüsselfrage lautet deshalb: Wie kann eine Reihe von chirurgischen Roboterfunktionen in eine Form gebracht werden, die der Patient oral einnehmen kann und die gleichzeitig körperverträglich ist?
Zoltan Nagy, seit 2006 Doktorand am Institut für Robotik
und intelligente Systeme der ETH Zürich (IRIS), präsentiert in einer kürzlich
erschienenen Publikation folgenden Lösungsansatz: Der Patient schluckt nicht
eine, sondern mehrere „Roboterpillen“, die mit einzelnen Funktionen wie der
Steuerung oder einer Zange für die Probeentnahme bestückt sind. Die Pillen
können nacheinander geschluckt werden und setzen sich erst im Magen automatisch
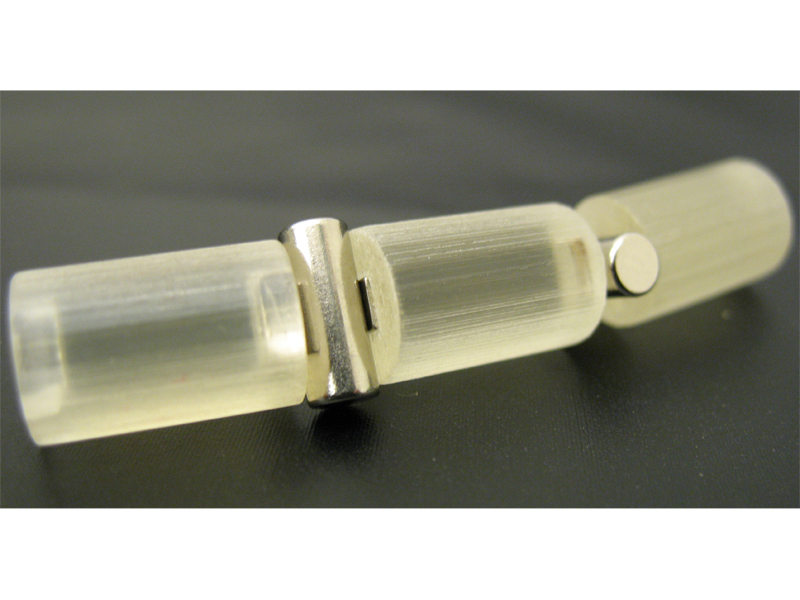
zu einem grösseren, leistungsfähigeren System zusammen. Nagy entwickelte dafür
einen magnetischen Mechanismus, durch welchen sich die Roboterteile im Magen
selbständig zu einem Gesamtsystem zusammenfügen können. Die einzelnen Teile
sind quer zur Oberfläche polarisiert und richten sich daher beim Zusammentreffen
in vorhersehbarer Abfolge aus.
Das System wurde in einem künstlichen Magen mit einer Erfolgsrate von 75 Prozent getestet. Da sich eine starre Kette aus mehreren Roboterteilen nur schlecht durch Magen und Darm bewegen lässt, hat Nagy zudem Zwischenglieder entwickelt, die das System beweglicher machen. Ähnlich einer mehrgliedrigen Kette, könnte sich das chirurgische System dadurch als Ganzes durch Magen und Darm bewegen. Ein magnetisches System hat zudem den Vorteil, dass sich beim Zusammentreffen der Einzelglieder das Magnetfeld charakteristisch verändert. Diese Änderung ist messbar, kann an einen Computer übermittelt werden und als Indikator für die genaue Position und Anordnung der Roboterschlange genutzt werden.
Grenzen des Machbaren ausloten
Noch ist die Anwendung eines solches Systems im menschlichen Körper Zukunftsmusik. Einerseits ist die Energieversorgung innerhalb der prekären Platzverhältnisse noch weitgehend ungelöst. Mit einer Kombination aus Batterie und Induktion könnte dieses Problem laut Nagy jedoch in naher Zukunft behoben werden. Andererseits stellt die Biokompatibilität die Wissenschaftler vor grosse Herausforderungen. Sollte es einst zu Versuchen am Menschen kommen, so müssen die Wissenschaftler garantieren können, dass der magnetische Mechanismus und die Funktionen der Roboter zu keiner Verletzung des Gewebes führen. Zudem muss das Gesamtsystem zu jeder Zeit in seine Einzelteile zerlegbar sein, falls es zu Komplikationen kommt.
Nagy geht deshalb nicht von baldigen In-vivo-Tests seines
selbstorganisierenden Systems aus. Dies ist aber auch nicht sein vorrangiges
Ziel: „Bei ARES geht es in erster Linie darum, die Grenzen des Möglichen
innerhalb der Bio-Mikrorobotik zu erweitern. Ich habe einen möglichen
Mechanismus für die Selbstorganisation eines Roboters präsentiert, der
Potenzial für eine chirurgische Anwendung hat. Welches System sich in Zukunft
in der Praxis durchsetzen wird, ist heute noch nicht abschätzbar.“
Literaturhinweis
Z. Nagy, R. Oung, J. J. Abbott, and B. J. Nelson, "Experimental Investigation of Magnetic Self-Assembly for Swallowable Modular Robots", in Proc. IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), pp. 1915-1920, Nice, France, 2008. doi: 10.1109/IROS.2008.4650662







LESERKOMMENTARE